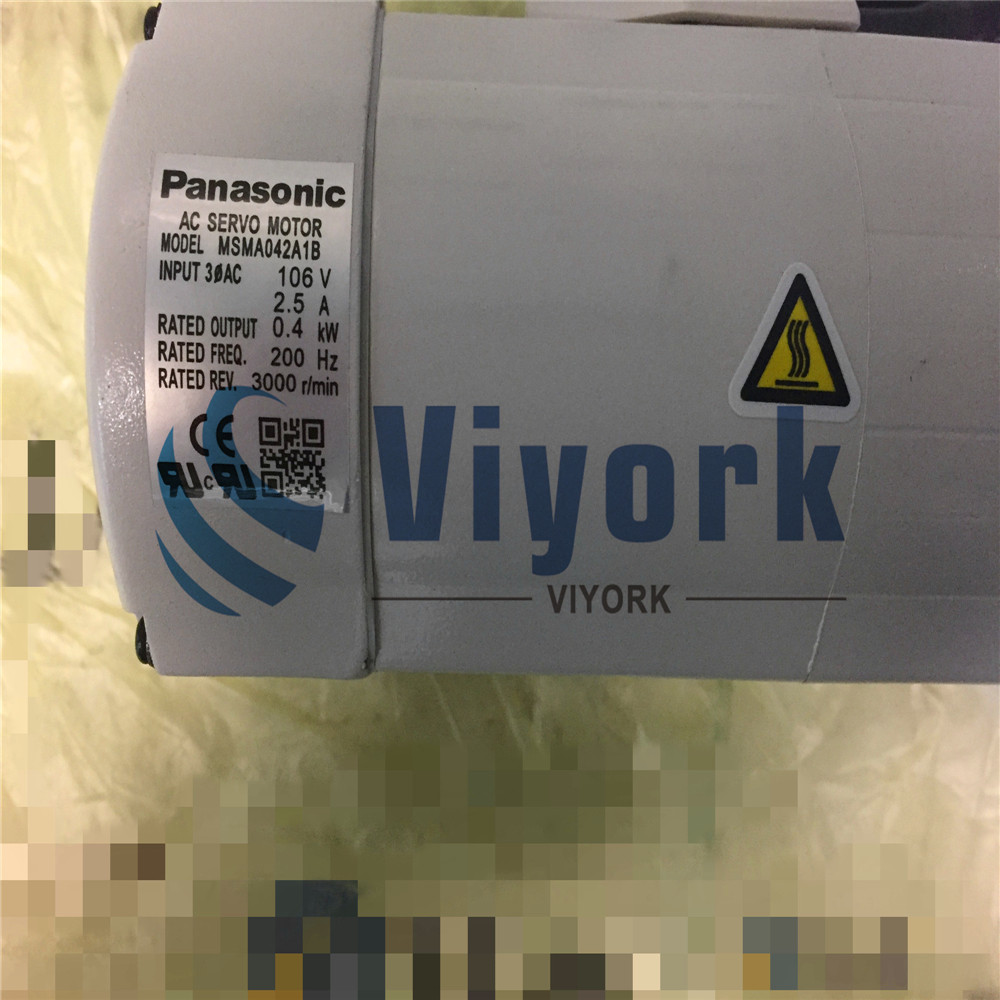
Panasonic AC Servo Motor MSMA042A1B




Especificacións para este elemento
| Marca | Panasonic |
| Tipo | AC Servo Motor |
| Modelo | MSMA042A1B |
| Potencia de saída | 400W |
| Corrente | 2.5amp |
| Tensión | 106v |
| Peso neto | 2kg |
| Velocidade de saída: | 3000rpm |
| País de orixe | Xapón |
| Condición | Novo e orixinal |
| Garantía | Un ano |
Información do produto
Ⅰ. O mantemento do motor de AC non se converte
O sistema CNC e a unidade de servo AC non só conectan o sinal de dirección Pulse +, senón tamén a función do sinal de control, e normalmente é a tensión da bobina do relé de 24V de 24V.
Se o servo motor non funciona, os métodos comúns de diagnóstico son: Comprobe se o sistema de control numérico ten saída do sinal de pulso; A través da pantalla LCD para observar se o estado de entrada/saída do sistema cumpre as condicións de partida do eixe de alimentación; Confirma que o freo foi aberto para o servo motor con freo electromagnético; Asegúrese de que a unidade de servo AC é defectuosa; Asegúrese de que o servo motor é defectuoso; Asegúrese de que o servo motor e o parafuso de conexión da articulación do eixe de conexión non sexan válidos ou desactivados.

Características do produto
Mantemento do movemento de motor de corrente alterna
Na alimentación de canalización, o sinal de velocidade non é estable, como as fisuras no codificador; Pobre contacto de terminal de cableado, como o parafuso solto; Cando o movemento se produce no momento inverso desde a dirección positiva ata a dirección contraria, xeralmente é causado pola eliminación inversa da cadea de alimentación ou a ganancia de unidade servo é demasiado grande.
Categorías de produtos
-

Delta ECMA-E11310QS Servo Motor 1kW 2000rpm Novo
-

Fanuc A860-2000-T301 Codificador Alpha A1000i Pulse ...
-

Mitsubishi HF-JP2034B AC Servo Motor 400V SRVMT ...
-

Mitsubishi HF-SP102 AC Servo Motor HF Series 1K ...
-

Motor Oriental Vexta ASM46MA AlphaStep Motor Novo
-

Mitsubishi HF-KP053 AC servo Motor HF Series UL ...






